
Segway is a Self Balancing two wheeled Scooter.
It uses motion and acceleration sensor to detect its orientation and then achieve self balance.
Today we are going to see how this self balancing robot is made.
Arduino Mini or Uno
MPU6050
L293D IC
2 DC Motors
2 Wheels
Some wires
Mechanical Design
Battery
The concept of operation is very simple.
When the scooter senses that it is tilted forward, it moves faster to the forward.
And when it senses that it is tilting behind, it moves faster to backwards.

Connection
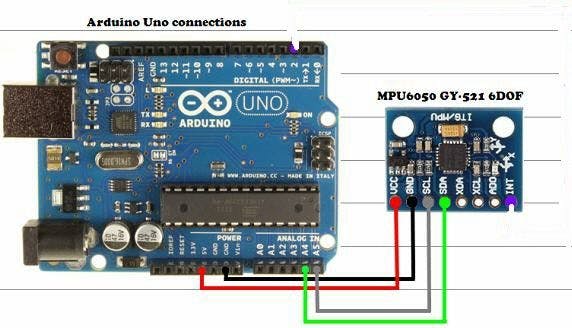
Here is how to connect motion sensor to Arduino

And this is the L293D IC to Arduino

Here is the complete project connection
Code
#include#include "Kalman.h" // Source: https://github.com/TKJElectronics/KalmanFilter #define RESTRICT_PITCH Kalman kalmanX; Kalman kalmanY; double accX, accY, accZ; double gyroX, gyroY, gyroZ; int16_t tempRaw; double gyroXangle, gyroYangle; // Gyroscope angle double compAngleX, compAngleY; // Complementary filter angle double kalAngleX, kalAngleY; // Angle after Kalman filter double corrected_x, corrected_y; // Corrected with offset uint32_t timer; uint8_t i2cData[14]; // Buffer for I2C data char a; double m = 0.7; double m1 = -0.7; int d = 0; int c = 0; char p; int in1_motor_left = 8; int in2_motor_left = 7; int in3_motor_right = 3; int in4_motor_right = 4; int pwm_on = 5; // ms ON int pwm_off = 5; // ms OFF //------------------------------------------------------------------------------ void setup() { // Define outputs pinMode(in1_motor_left, OUTPUT); pinMode(in2_motor_left, OUTPUT); pinMode(in3_motor_right, OUTPUT); pinMode(in4_motor_right, OUTPUT); // Start serial console Serial.begin(115200); //BT.begin(9600); delay(50); // Initiate the Wire library and join the I2C bus as a master or slave Wire.begin(); TWBR = ((F_CPU / 400000L) - 16) / 2; // Set I2C frequency to 400kHz i2cData[0] = 7; // Set the sample rate to 1000Hz - 8kHz/(7+1) = 1000Hz i2cData[1] = 0x00; // Disable FSYNC and set 260 Hz Acc filtering, 256 Hz Gyro filtering, 8 KHz sampling i2cData[2] = 0x00; // Set Gyro Full Scale Range to 250deg/s i2cData[3] = 0x00; // Set Accelerometer Full Scale Range to 2g while (i2cWrite(0x19, i2cData, 4, false)); // Write to all four registers at once while (i2cWrite(0x6B, 0x01, true)); // PLL with X axis gyroscope reference and disable sleep mode while (i2cRead(0x75, i2cData, 1)); if (i2cData[0] != 0x68) { // Read "WHO_AM_I" register Serial.print(F("Error reading sensor")); while (1); } delay(100); // Wait for sensor to stabilize /** * Set kalman and gyro starting angle * */ while (i2cRead(0x3B, i2cData, 6)); accX = (i2cData[0] << 8) | i2cData[1]; accY = (i2cData[2] << 8) | i2cData[3]; accZ = (i2cData[4] << 8) | i2cData[5]; // atan2 outputs the value of - to (radians) - see http://en.wikipedia.org/wiki/Atan2 // It is then converted from radians to degrees #ifdef RESTRICT_PITCH double roll = atan2(accY, accZ) * RAD_TO_DEG; double pitch = atan(-accX / sqrt(accY * accY + accZ * accZ)) * RAD_TO_DEG; #else double roll = atan(accY / sqrt(accX * accX + accZ * accZ)) * RAD_TO_DEG; double pitch = atan2(-accX, accZ) * RAD_TO_DEG; #endif kalmanX.setAngle(roll); kalmanY.setAngle(pitch); gyroXangle = roll; gyroYangle = pitch; compAngleX = roll; compAngleY = pitch; timer = micros(); } //------------------------------------------------------------------------------ void loop() { while (i2cRead(0x3B, i2cData, 14)); accX = ((i2cData[0] << 8) | i2cData[1]); accY = ((i2cData[2] << 8) | i2cData[3]); accZ = ((i2cData[4] << 8) | i2cData[5]); tempRaw = (i2cData[6] << 8) | i2cData[7]; gyroX = (i2cData[8] << 8) | i2cData[9]; gyroY = (i2cData[10] << 8) | i2cData[11]; gyroZ = (i2cData[12] << 8) | i2cData[13]; // Calculate delta time double dt = (double)(micros() - timer) / 1000000; timer = micros(); #ifdef RESTRICT_PITCH double roll = atan2(accY, accZ) * RAD_TO_DEG; double pitch = atan(-accX / sqrt(accY * accY + accZ * accZ)) * RAD_TO_DEG; #else double roll = atan(accY / sqrt(accX * accX + accZ * accZ)) * RAD_TO_DEG; double pitch = atan2(-accX, accZ) * RAD_TO_DEG; #endif double gyroXrate = gyroX / 131.0; // Convert to deg/s double gyroYrate = gyroY / 131.0; // Convert to deg/s #ifdef RESTRICT_PITCH // This fixes the transition problem when the accelerometer angle jumps between -180 and 180 degrees if ((roll < -90 && kalAngleX > 90) || (roll > 90 && kalAngleX < -90)) { kalmanX.setAngle(roll); compAngleX = roll; kalAngleX = roll; gyroXangle = roll; } else kalAngleX = kalmanX.getAngle(roll, gyroXrate, dt); // Calculate the angle using a Kalman filter if (abs(kalAngleX) > 90) gyroYrate = -gyroYrate; // Invert rate, so it fits the restriced accelerometer reading kalAngleY = kalmanY.getAngle(pitch, gyroYrate, dt); #else // This fixes the transition problem when the accelerometer angle jumps between -180 and 180 degrees if ((pitch < -90 && kalAngleY > 90) || (pitch > 90 && kalAngleY < -90)) { kalmanY.setAngle(pitch); compAngleY = pitch; kalAngleY = pitch; gyroYangle = pitch; } else kalAngleY = kalmanY.getAngle(pitch, gyroYrate, dt); // Calculate the angle using a Kalman filter if (abs(kalAngleY) > 90) gyroXrate = -gyroXrate; // Invert rate, so it fits the restriced accelerometer reading kalAngleX = kalmanX.getAngle(roll, gyroXrate, dt); // Calculate the angle using a Kalman filter #endif gyroXangle += gyroXrate * dt; // Calculate gyro angle without any filter gyroYangle += gyroYrate * dt; compAngleX = 0.93 * (compAngleX + gyroXrate * dt) + 0.07 * roll; // Calculate the angle using a Complimentary filter compAngleY = 0.93 * (compAngleY + gyroYrate * dt) + 0.07 * pitch; // Reset the gyro angle when it has drifted too much if (gyroXangle < -180 || gyroXangle > 180) gyroXangle = kalAngleX; if (gyroYangle < -180 || gyroYangle > 180) gyroYangle = kalAngleY; delay(2); Serial.println(); // Corrected angles with offset corrected_x=kalAngleX-171,746; corrected_y=kalAngleY-81,80; corrected_y = corrected_y+84; Serial.print(corrected_y); pwm_adjust(corrected_y); if(corrected_y>=m && corrected_y<20){ if(c>6){ m-=0.2; m1-=-0.2; c=0; } backward(); } else if(corrected_y>=-20 && corrected_y<=m1){ Serial.print(" "); if(d>6){ m+=0.2; m1+=0.2; d=0; } forward(); }else{ stop(); m=0.7; m1=-0.7; pwm_on = 0; pwm_off = 0; } } void forward(){ d++; //Serial.print(d); digitalWrite(in3_motor_right, LOW); digitalWrite(in4_motor_right, HIGH); digitalWrite(in1_motor_left, HIGH); digitalWrite(in2_motor_left, LOW); delay(pwm_on); digitalWrite(in3_motor_right, LOW); digitalWrite(in4_motor_right, LOW); digitalWrite(in1_motor_left, LOW); digitalWrite(in2_motor_left, LOW); delay(pwm_off); } void backward(){ c++; digitalWrite(in3_motor_right, HIGH); digitalWrite(in4_motor_right,LOW); digitalWrite(in1_motor_left, LOW); digitalWrite(in2_motor_left, HIGH); delay(pwm_on); digitalWrite(in3_motor_right, LOW); digitalWrite(in4_motor_right, LOW); digitalWrite(in1_motor_left, LOW); digitalWrite(in2_motor_left, LOW); delay(pwm_off); } void stop(){ digitalWrite(in1_motor_left, LOW); digitalWrite(in2_motor_left, LOW); digitalWrite(in3_motor_right, LOW); digitalWrite(in4_motor_right, LOW); delay(pwm_on); digitalWrite(in1_motor_left, LOW); digitalWrite(in2_motor_left, LOW); digitalWrite(in3_motor_right, LOW); digitalWrite(in4_motor_right, LOW); delay(pwm_off); } void pwm_adjust(int value_y){ if(value_y >=-1 && value_y <=1 ){ int k = (value_y*value_y); Serial.print(k); pwm_on = 5; // ms ON pwm_off = 3; // ms OFF } else if((value_y>=-3 && value_y<- span="">1)||(value_y>1 && value_y<=3) ){ pwm_on = 50; pwm_off = 5; } else if(value_y >5 || value_y <=-5 ){ Serial.print("**"); pwm_on = 120; // ms ON pwm_off = 3; // ms OFF } else stop(); }
https://create.arduino.cc/projecthub/s_r-tronics/self-balancing-robot-using-mpu-6050-accelerometer-74d57d
Here is Another project but uses the same components on instructables
https://www.instructables.com/id/2-Wheel-Self-Balancing-Robot-by-using-Arduino-and-/
I have all its components so I will make it soon. Stay Tuned.

![A Trip To Siwa Oasis: Tourist guide to an Egyptian Oasis by [ElSakhawy, Sara M.]](https://images-na.ssl-images-amazon.com/images/I/51-IGAzLKML.jpg)
![The Ultimate travel bag list by [ Elskhawy, Sara M.]](https://images-na.ssl-images-amazon.com/images/I/51OlVgqIcwL.jpg)
![Why to Travel?: Travel Like an Insider by [M., Sara]](https://images-na.ssl-images-amazon.com/images/I/51BsVhmk3ZL.jpg)
![3 Easy steps to plan your trip: Travel Like an Insider by [Elskhawy, Sara M.]](https://images-na.ssl-images-amazon.com/images/I/51GRc%2BnSxAL.jpg)
![Solar Artwork: How to Make Your Own Solar Masterpiece by [Ebeed, Ahmed]](https://images-na.ssl-images-amazon.com/images/I/51wT6i0RXNL.jpg)
![Backyard Wind Turbines: Harness wind power with simple and fun projects by [Ebeed, Ahmed]](https://images-na.ssl-images-amazon.com/images/I/51JEcdMP8JL.jpg)

No comments:
Post a Comment